O robô fornece injeções de ultraprecisão com tempos de configuração rápidos
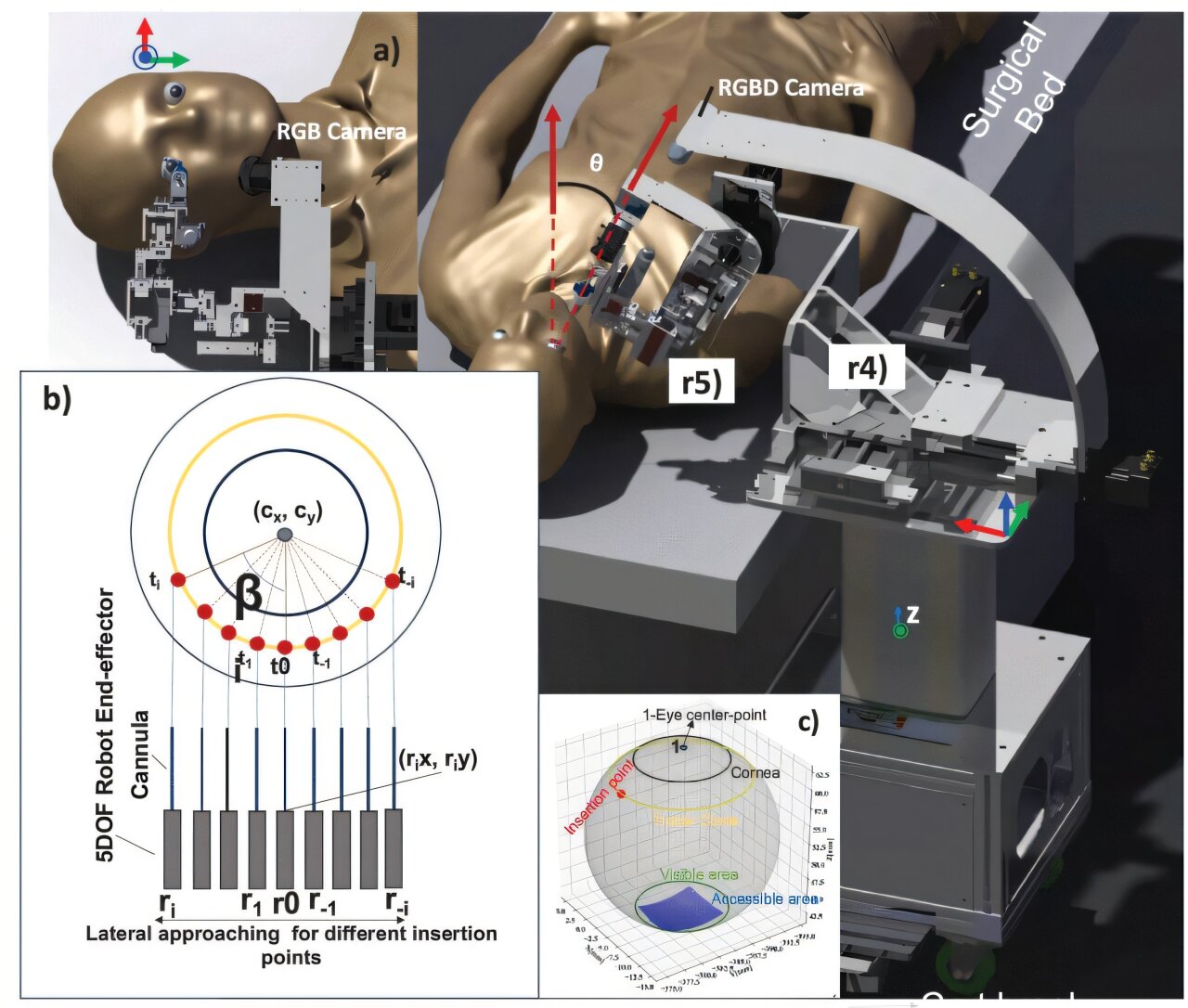
Uma visão geral simulada do alinhamento do paciente. Crédito: Acesso IEEE (2025). DOI: 10.1109/acesso.2025.3564944
Muitos cirurgiões admitem que os robôs médicos podem agora operar com maior precisão do que os especialistas humanos. No entanto, a preparação complexa necessária para a cirurgia robótica ainda demora muito tempo. Mas um novo assistente robótico para cirurgia ocular para degeneração macular relacionada à idade (DMRI), desenvolvido pelo Prof. Mohammad Ali Nasseri, da Universidade Técnica de Munique (TUM), está pronto para funcionar em menos de cinco minutos.
Atualmente, os médicos tratam a DMRI injetando medicamentos na lateral do olho. O robô é capaz de inserir injeções na retina de 200 micrômetros de espessura com precisão de apenas 15 micrômetros. Isto garante que o ingrediente ativo seja entregue precisamente no local certo, onde pode bloquear um fator de crescimento que, de outra forma, levaria à cegueira nas pessoas afetadas.
Atualmente, quase 200 milhões de pessoas em todo o mundo sofrem com a doença e, até 2040, esse número deverá aumentar para mais de 280 milhões. Pessoas com mais de 60 anos são particularmente afetadas, sendo a DMRI a causa da cegueira em quase um em cada dez casos.
Cinco minutos de preparação para o robô e o paciente
Nasseri conduz pesquisas na Cátedra de Autonomia Médica e Cirurgia de Precisão e é membro do Instituto de Robótica e Inteligência de Máquinas de Munique (TUM MIRMI). Sua equipe desenvolveu uma plataforma móvel com plataforma giratória e braço robótico altamente sensível. Os sensores localizam automaticamente o olho e a íris.
“Treinamos as redes neurais para que o robô possa assumir a posição perfeita para a operação em menos de cinco minutos”, diz Nasseri. Normalmente, a preparação para uma cirurgia assistida por robô leva até uma hora.
Precisão de 15 micrômetros viável
O processo de preparação cirúrgica ideal envolve a plataforma móvel movendo-se até a cama de tratamento com precisão centimétrica, posicionando os instrumentos robóticos acima da cama com precisão milimétrica e, por fim, operando com precisão micrométrica.
“O último passo é o maior desafio”, diz Nasseri, que está colaborando com uma empresa japonesa no desenvolvimento do “manipulador” de alta precisão.
É capaz de colocar a seringa com precisão de 15 micrômetros. No entanto, apesar da anestesia, o olho pode mover-se involuntariamente durante a cirurgia. Para detectar esses movimentos leves e lentos, os pesquisadores usam um dispositivo de tomografia de coerência óptica (OCT), que captura continuamente imagens da retina.
Para replicar e simular esse movimento, os pesquisadores fizeram com que um olho artificial realizasse movimentos sinusoidais. O novo robô de precisão é capaz de acompanhar esses movimentos durante um minuto inteiro. Isso permite que o medicamento seja administrado com um desvio de 25 micrômetros – ou seja, 0,025 milímetros.
“Isso ainda é perfeitamente adequado para tais aplicações”, diz o Prof. Nasseri. A Clínica TUM desempenhou um papel crucial no desenvolvimento do robô. O diretor do Departamento de Oftalmologia, Prof. Peter Charbel Issa, está confiante de que ajudará a evitar complicações como inflamações, que podem ocorrer na administração manual de medicamentos.
A pesquisa está publicada em Acesso IEEE e como parte do Simpósio Internacional de Robótica Médica 2025 (ISMR).
Ainda levará algum tempo até que o robô realmente administre sua primeira injeção no olho humano: o próximo passo será testá-lo nos olhos de porcos mortos, que são muito semelhantes em estrutura aos dos humanos.
Os testes iniciais em animais vivos estão planeados para o início de 2026, antes que os humanos possam receber a sua primeira injecção em ensaios clínicos dentro de alguns anos.
Mais informações:
Alireza Alikhani et al, PAROS: Sistema robótico multicomponente e um alinhamento de paciente guiado por imagem para cirurgia oftalmológica assistida por robô, Acesso IEEE (2025). DOI: 10.1109/acesso.2025.3564944
Demir Arikan et al, Rumo à compensação de movimento em injeções sub-retinianas robóticas autônomas, Simpósio Internacional de Robótica Médica 2025 (ISMR) (2025). DOI: 10.1109/ismr67322.2025.11025990
Citação: Degeneração macular relacionada à idade: o robô aplica injeções de ultraprecisão com tempos de configuração rápidos (2025, 22 de outubro) recuperado em 22 de outubro de 2025 em
Este documento está sujeito a direitos autorais. Além de qualquer negociação justa para fins de estudo ou pesquisa privada, nenhuma parte pode ser reproduzida sem permissão por escrito. O conteúdo é fornecido apenas para fins informativos.
Share this content:

Publicar comentário